掌握YOLOv4-tiny的Jetson Nano部署方法
学习deepstream视频分析流程
 分享
分享 

YOLOv4目标检测实战:Jetson Nano部署
你将收获
掌握YOLOv4-tiny的Jetson Nano部署方法
学习deepstream视频分析流程
适用人群
课程介绍
YOLOv4(AlexyAB/darknet)是最近推出的端到端实时目标检测方法。YOLOv4-tiny是对YOLOv4的轻量化模型,适合在边缘计算设备上部署。 Jetson Nano是英伟达含有GPU的人工智能硬件。本课程讲述如何部署YOLOv4-tiny在Jetson Nano开发板上。 部署完成后可进行视频文件和摄像头视频的实时目标检测。部署时将使用AI视频处理加速引擎TensorRT和DeepStream。
课程内容包括:原理篇(DeepStream介绍、TensorRT介绍、YOLOv4-Tiny介绍)、实践篇(Nano硬件搭建、烧录系统镜像、安装远程登录工具、安装和测试DeepStream、使用DeepStream部署YOLOv4-tiny、Nano部署测试)
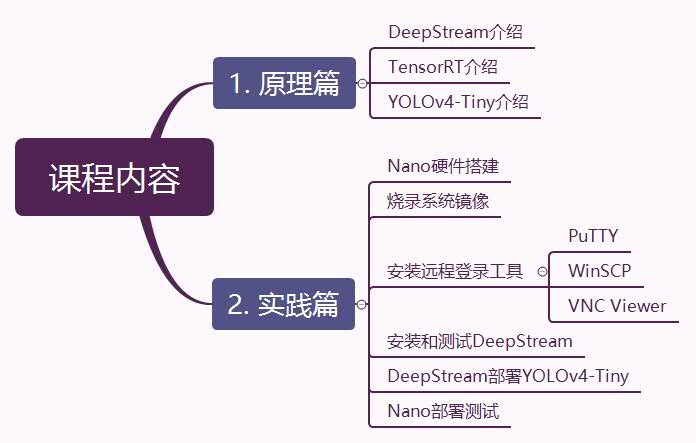
课程目录