从零起步实战slam
返回
从零起步实战slam
共10节
473人在学
课程详情
¥199.00订阅全部
初识SLAM与环境配置
SLAM概览与系统环境配置
SLAM中的基础
掌握slam的C++和数学基础
李群与李代数
相机成像及常用视觉传感器
最小二乘法
掌握slam核心技术点
视觉里程计
多视角几何
视觉里程计中的位姿估计方法
构建完整slam系统 打通求职晋升之路
非线性优化
回环检测与重建
订阅失败
从零起步实战slam
...
当前章节需购买后观看
开通超级会员免费看!专家精选系列课程,满足你从入门到精通!更有问答月卡免费送,你的问题有问必答!
提交答案
购买课程
扫码完成付费,可继续学习全部课程内容
加载中...
播放页问题反馈
视频学习中有任何产品建议都可由此反
馈,我们将及时处理!
课时介绍
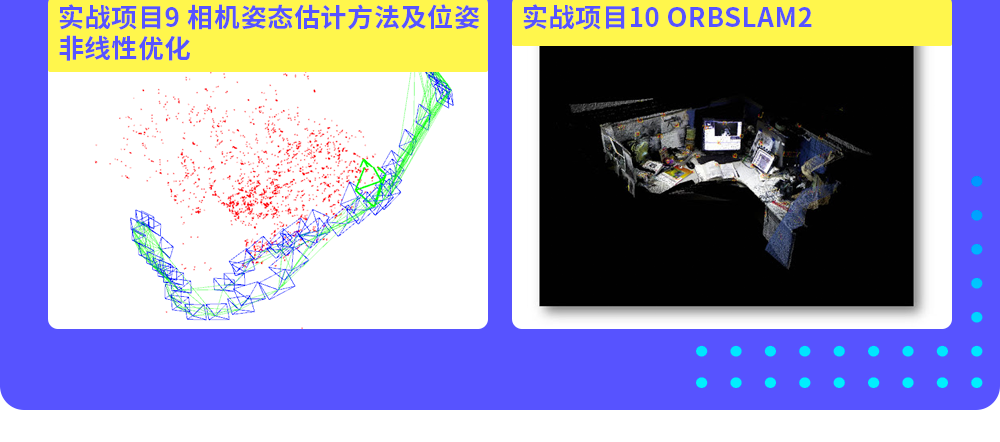
知识点1: 卡尔曼滤波; 知识点2: Bundle Adjustment与图优化; 知识点3: 位姿图的意义与优化; 实战项目: 相机姿态估计方法及位姿非线性优化
课程介绍
推荐课程
正在试验
后自动删除环境
关闭试验
继续试验
课程实验
本次实验时间已到期 00:00:00
课件正在飞速打包中,请耐心等待几秒钟~