slam移动机器人里程计算法原理的深度解剖

课时介绍
课程介绍
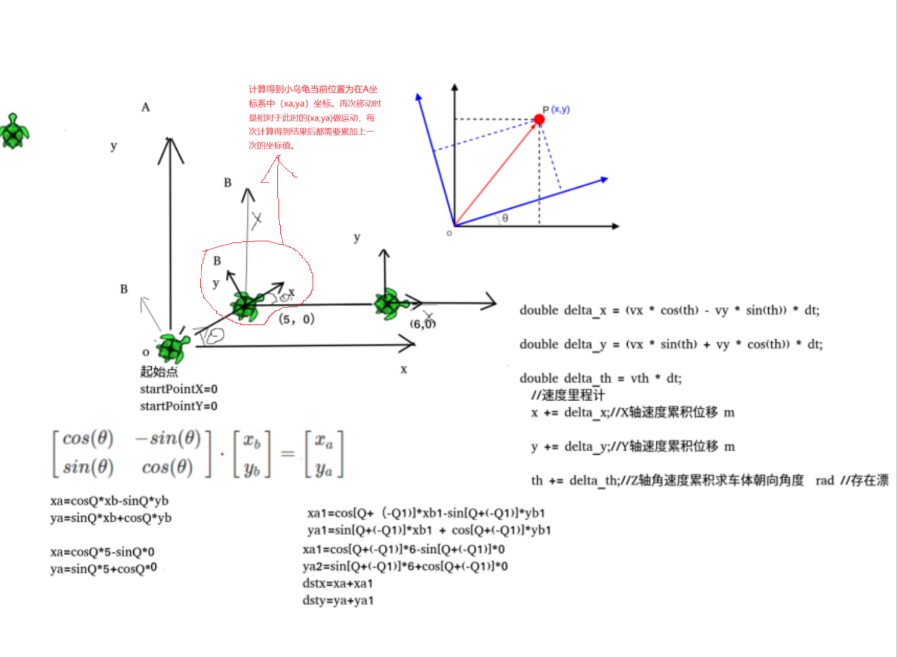
这门课程以移动机器人里程计算法项目为核心,系统讲解坐标变换原理,包括坐标向量、旋转平移等知识。
我们通过理论推导与手动计算,详细剖析了2D坐标变换的方法。实际上,2D与3D坐标变换的底层逻辑是相通的。
后续我会为大家快速拆解3D坐标变换的核心原理,带大家进一步探索空间变换的奥秘!
具体内容:
1.移动机器人里程计算法学科介绍
2.里程计_2D坐标系向量平移
3.里程计_2D坐标系旋转原理
4.里程计_2D坐标系旋转平移
5.里程计代码讲解
6.快速拆解3D坐标变换的核心原理 【新加内容】
听课具备条件:
1.从事slam移动机器人研发工作或是在校从事这方面研究的学生,对移动机器人各算法的用途有了解。
2.了解Navigation框架,Navigation框架目前比较流行的移动机器人导航框架。
3.需要了解一下线性代数中最基本的矩阵运算(矩阵加法,矩阵乘法即可)。
收获:
1.了解 Navigation导航框架基本的架构及各模块的功能。
2.收获2d坐标变换的算法实现能力。继而可以按2d坐标变换的算法思路自己推导出3d坐标变换的矩阵运算公式。
3.收获里程计的工作原理及算法的实现原理。
4.坐标变换算法是移动机器人定位算法研发工程师必要的算法能力。
 5.掌握3D坐标变换的核心算法原理
5.掌握3D坐标变换的核心算法原理
信息系统项目管理师自考笔记
李明 · 926人在学
python从0到1:期货量化交易系统(CTP实战,高频及合成K线数据
王先生 · 22848人在学

手把手搭建Java超市管理系统【附源码】(毕设)
汤小洋 · 4296人在学
Java毕设springboot外卖点餐系统 毕业设计毕设源码 使用教
黄菊华 · 838人在学
基于SSM酒店管理系统(毕设)
小尼老师 · 900人在学
java项目实战之购物商城(java毕业设计)
Long · 5204人在学

手把手搭建Java求职招聘系统【附源码】(毕设)
汤小洋 · 1534人在学
Python Django 深度学习 小程序
钟翔 · 2413人在学

城管局门前三包管理系统+微信小程序(vue+springboot)
赖国荣 · 683人在学
Vue+Uni-app(uniapp)入门与实战+赠送仿美团点餐小程序
李杰 · 4082人在学