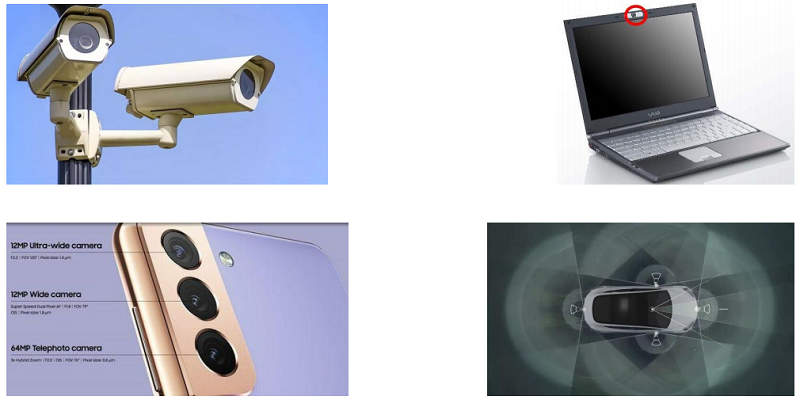
相机是产生图像数据的硬件,广泛应用于消费电子、汽车、安防等领域。
相机如何实现成像?像素与真实世界中的物体之间是如何联系?这属于相机成像问题,它是图像处理中的经典研究内容,以此为基础衍生出相机标定、图像变换、立体视觉、单目测距等研究领域。
目前火热的自动驾驶领域中,相机标定、基于相机内外参的立体视觉也是其基础入门知识。因此对于图像处理领域的研究人员/工程师,理解并掌握相机的成像原理与相机标定的技能,十分重要。
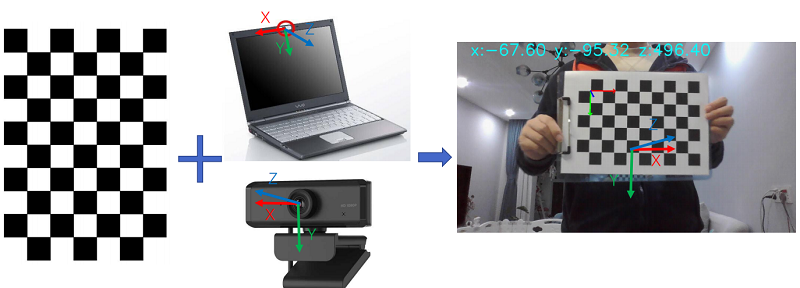
本课程的主要内容为基于OpenCV对单目相机进行标定,同时配合标靶实现三维空间中标靶的定位。通过该系列课程的学习,你将掌握1)相机的成像原理;2)相机内参、外参的定义与作用;3)PC端相机的数据采集与内参标定;4)如何实现单目相机的测距。
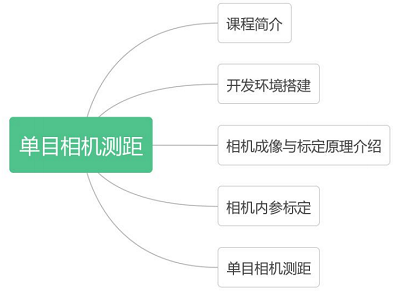
课程结构如下图所示,课程资料包括PPT、文档、源代码均提供下载学习,源代码下载地址位于第二讲PPT中。

 分享
分享